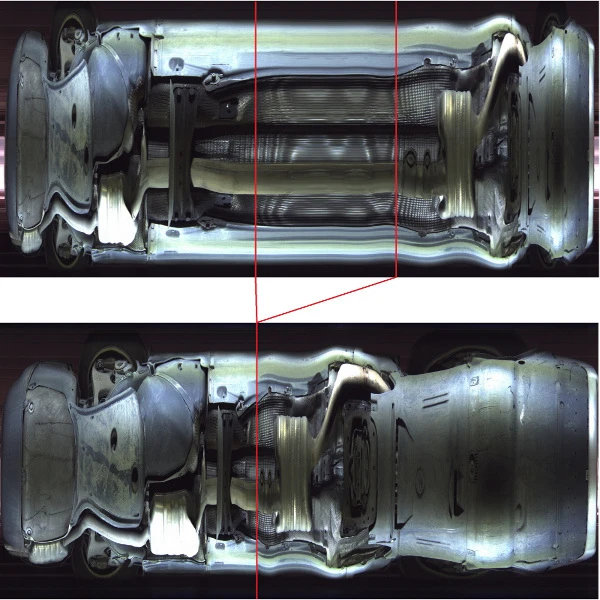
线阵车底扫描不能支持AI 10 10 月, 2024 msf 线阵车底扫描系统不能侦测车辆速度,所以针对同一车辆的多次扫描都可能由于速度不同而产生不同的畸变,因而线阵扫描技术不能适用于人工智能算法做后期分析。 如图所示,如果车辆在扫描仪上停留一段时间,扫描仪会不停的扫描同一位置,产生的图像畸变无法估计。 人工智能算法都需要目标图像保持高度的一致性,因而线阵扫描技术的畸变使得人工智能算法无法正常工作。 https://www.dgvtec.com/wp-content/uploads/2024/10/video_line_vs_area.mp4